Abstract
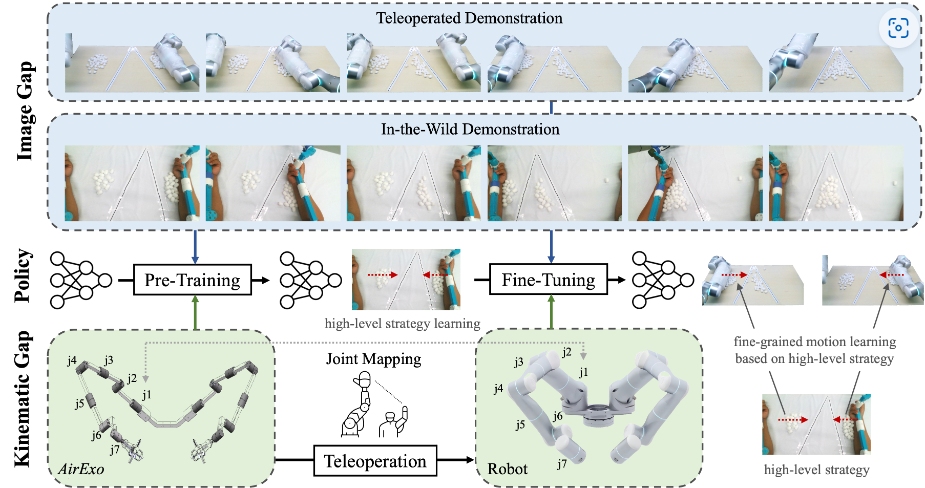
Robot imitation learning from human demonstrations holds tremendous promise for enabling robots to acquire complex skills by observing and mimicking human operations. However, the challenge lies in making this process both efficient and effective. Efficiency in imitation learning is crucial for reducing the burden of real-world human demonstration data collection. To this end, we present RH20T, an extensive real-world dataset featuring over110k contact-rich robot manipulation trajectories spanning diverse skills,contexts, robots, and camera perspectives. These trajectories were collected through human teleoperations, offering a rich and varied resource for learning algorithms. In the pursuit of simplifying the data collection process for bimanual robots, we introduce AirExo, a low-cost exoskeleton system designed for learning whole-arm manipulations in the wild. Through our research, we demonstrate that with a mere 3 minutes of teleoperated demonstrations, augmented by the diverse and extensive in-the-wild data gathered by AirExo, robots can acquire a policy that rivals or even surpasses those derived only from teleoperated demonstrations lasting over 20minutes. Our findings highlight the potential of streamlining robot imitation learning through efficient data collection methods to enhance their adaptability and proficiency in real-world scenarios
Speaker
Hongjie Fang is a second-year Ph.D. student in Computer Science andEngineering at Shanghai Jiao Tong University & Shanghai ArtificialIntelligence Laboratory under the supervision of Prof. Cewu Lu. He obtained hisBachelor of Engineering degree in Computer Science and Engineering fromShanghai Jiao Tong University in 2022. His research interest lies in the robotic manipulations and grasping field, with a particular focus on imitation learning from human demonstrations. He has published several papers in conferences such as ICRA, IROS, and journals including TRO and RAL.
Video
Extra Details
Speaker Website / Paper Link / Paper Link / Paper Project Page / Paper Project Page / Paper Code / Paper Code